One of Ximira's goals driving the design of PHINIX is to leverage readily available hardware and freely available, proven, open-source software whenever and wherever possible. This page presents a high-level overview of the hardware and software used in our system.
Driving Philosophy
As we have planned, designed and developed PHINIX, we have attempted to adhere to the following core guidelines to drive our decision making.
Hardware
- High Compute and Inference Performance
- Broad Availability
- Minimal Lock-in
- Power-per-watt Efficiency
- Clear Upgrade Path
System Software
- Platform-Agnostic
- Minimal Lock-In
- Stable w/ Support Options
- Broad Peripheral Hardware Support
Development Software
- Open-source w/ corporate backing
- Large community and developer ecosystems
- Established and enduring languages and platforms
Hardware
As described in our vision, initial versions of PHINIX will be designed to leverage the following hardware components:
- Compute Module
- Vision Module
- Wireless Haptic Wristbands
- Wireless Headset
- Mobile Phone/Tablet Application
- Compact Cross-Body Pack
Though we expect most users will opt for a bone conduction headset to help the wearer maintain the greatest degree of situational awareness, PHINIX will be designed to work with any standard Bluetooth headset. Likewise, PHINIX will work with any modern mobile phone running on either Apple's iOS or Google's Android mobile operating systems.
Hardware for three of the components have been selected and designed especially for PHINIX, and are briefly explored below.

Compute Module
The "main brain" of PHINIX is engineered around parts initially intended for use in compact laptop computers. The unit is designed to be moved transferred easily between the PHINIX's cross-body pack and a desktop charging dock.
Dimensions & Details
- 270mm x 128mm x 27mm
- 10.6in x 5in x 1.1in
- Weight: Under 1 kg / 2 lbs
- Battery: 55Wh+ Li-Ion
- Target Cost: Under $800
Minimum Specifications
- Intel Mobile CPU (i5-1240P)
- Intel Iris Xe GPU
- Wi-Fi 6e & Bluetooth 5
- 3+ USB-C 3.1 Ports
- 16+ GB RAM / 500 GB SSD
- Microphone and Speakers

Vision Module
The Vision Module is engineered around the Luxonis OAK-D Pro-W camera, offering a high quality, wide angle 3D video image and an integrated Vision Processing Unit (VPU). The module attaches to the front strap of the cross-body pack and is connected to the Compute Module via a USB-C cable.
Dimensions & Details
- 115mm x 70mm x 21mm
- 4.5in x 2.8in x 0.8in
- Weight: Under 200 g / 0.3 lbs
- Target Cost: under $500
Highlighted Specifications
- Field of View: 127° H x 80° V
- Stereo Cameras for 3-D Depth
- Infrared Illuminator
- Laser Dot Emitter
- Intel Movidius Myriad X VPU

Wireless Haptic Bands
PHINIX may also leverage a pair of haptic bands to augment the verbal communication from the system to the user. These bands can convey a variety of messages and notifications designed to improve both user safety and user experience.
More information: An Open Source Vibrotactile Haptics Platform for On-Body Applications
Software
PHINIX is a large system comprised of numerous software packages running on a number of hardware components. Here we provide a high-level view of our primary runtime software architecture as well as our development tools and workflows.
Compute Module Architecture (PHINIX Hub)
Operating Environment
- Ubuntu 20.04.x
- ROS 2 Foxy
Development Tools, Frameworks and Workflows
AI/CV Frameworks & Toolkits
- OpenVINO
- OpenCV
- DepthAI
- Pytorch
- Tensorflow
- ONNX
Programming Languages
- Python 3
- C++
- C# / .Net 7
- CircuitPython
- OpenCL
AI/CV Model Training & Optimization Workflow
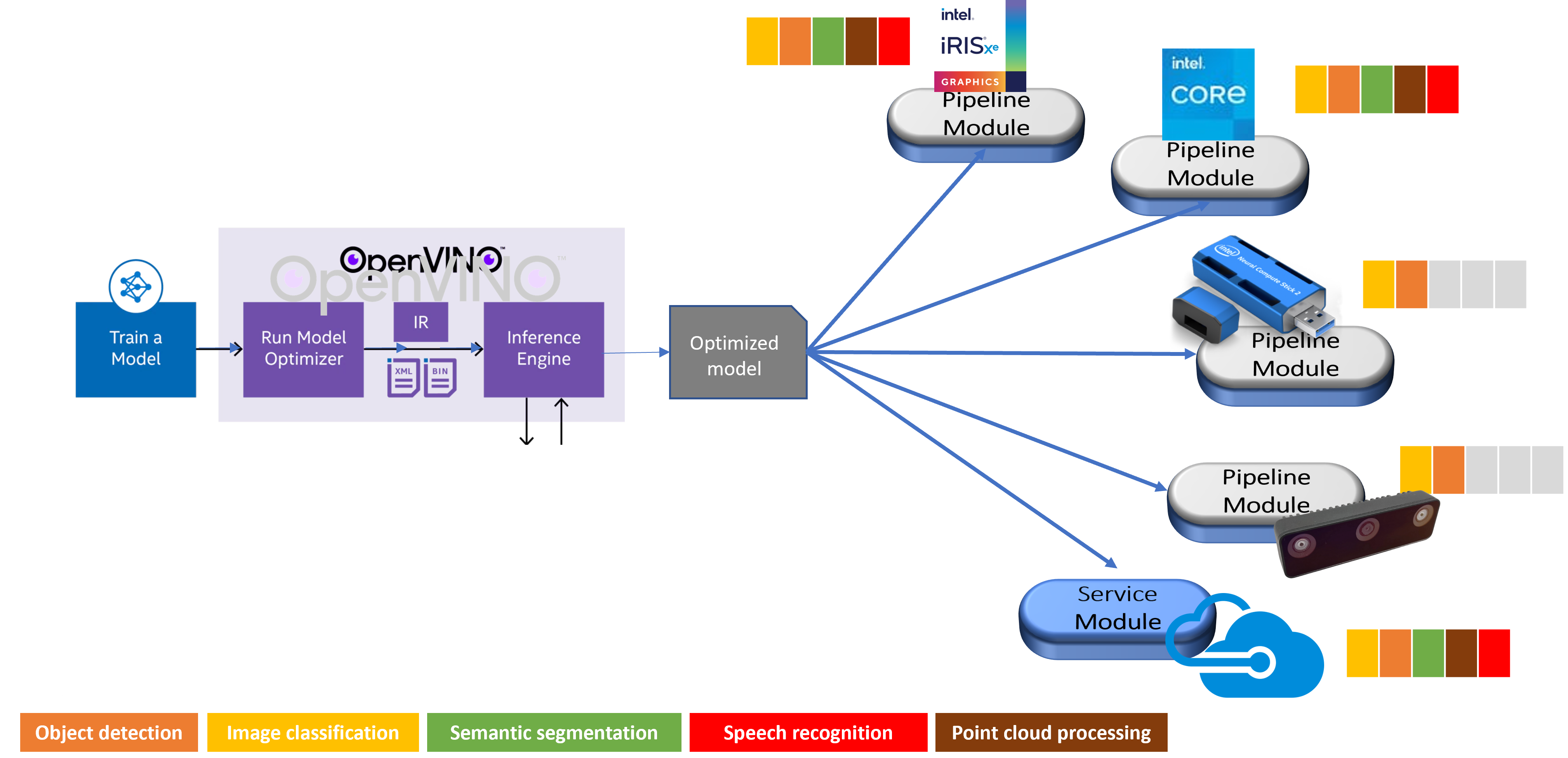
PHINIX is a "cloud-optional" edge computing system. It must continue to provide safety-critical functions entirely disconnected from any wide-area networking or cloud infrastructure. PHINIX must run numerous Computer Vision models simultaneously and with minimal latency. As such, it is vital that our models are optimized to take advantage of all of our computation and inference capabilities.
The above diagram depicts the basic steps in the workflow used to train and optimize the computer vision models used by the PHINIX system. At the heart of this system is OpenVINO toolkit, which allows us to optimize each model for deployment on each specific type of hardware, be it CPU, GPU, VPU, or—for non-critical tasks—the cloud.
More Details
As noted, Ximira is committed to making our entire hardware and software platform freely available as open source. We ask that you bear with us as we work through all of the details and finalize our design and reference packages for deployment. In addition to our hardware and software, we will soon make public a documentation hub that will target both end-users and developers.
Stay tuned!